
摘要:采用TI公司的TMS320C6713DSP芯片實現了GPS接收機定位解算功能。利用該芯片實現GPS接收機各模塊的調度,完成對時間觀測量和導航電文的提取,進行衛星位置解算和用戶環型線圈電感器位置解算以及對插件電感器外接口。試驗結果表明,根據該方案設計的GPS接收機工程樣機可以準確地實現定位解算功能。
關鍵詞:GPS接收機;TMS320C6713;中斷;EMIF;定位解算
0 引言
全球定位系統(GlobaI Positioning System,GPS)是一種全天候、全球覆蓋、高精度的衛星導航定位系統。該系統向有適當接收設備的全球范圍用戶提供精確、連續的三維位置和時間信息。DSP芯片具有適合于數字信號處理的硬件和軟件資源,運算速度快,精度高,接口豐富,穩定性好,可用于實現復雜的數字信號處理算法。隨著DSP技術的發展,GPS衛星信號的實時處理越來越趨向于用DSP來實現。TMS320C67 13是TI公司生產的一種32位高性能浮點型數字信號處理器,功能強大,片內資源豐富,外擴存儲器方便,運算速度快,共模電感器無論從速度上還是精度上,TMS320C6713芯片都完全可以滿足GPS接收機系統的設計要求。
1 GPS定位解算原理
1.1 用戶位置的計算
GPS衛星定位系統定位的基本原理是延時測距,通過測量空間己知位置上信號傳播的時間延遲,確定該己知位置至用戶的距離,根據測量距離解算出用戶的三維位置和用戶與已知位置的時間偏移量。為了確定用戶的三維位置(xu,yu,zu)和時間偏移量,需要同時對4顆衛星進行跟蹤并獲取其偽距:

由于這個方程組是非線性的,很難直接求解,解非線性方程組一個常用的方法就是線性化。由于用戶的三維位置和時間偏移量是未知量,于是可以認為未知的接收機位置和時間偏移量由近似分量![]() 和修正分量△xu,△yu,△zu,△tu兩部分組成,即:
和修正分量△xu,△yu,△zu,△tu兩部分組成,即:

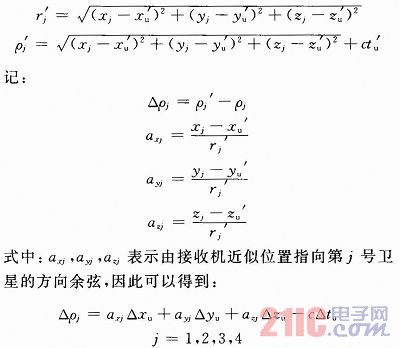
式中:ρj是第j顆衛星的偽距觀測量;xj,yj,zj是根據第j顆衛星的星大功率電感貼片電感器歷計算出該顆衛星的位置,均為已知量;用戶的三維位置和時間偏移量的修正分量△xu,△yu,△zu,△tu是未知量,近似分量![]() 可以認為是已知量。因為可以給這些近似分量賦初值,由初值可以解出一組修正分量△xu,△yu,△zu,△tu,近似分量經過修正之后又可以認為是已知量,重復這個計算過程,直到修正分量小到預定的范圍之內。最后的近似分量
可以認為是已知量。因為可以給這些近似分量賦初值,由初值可以解出一組修正分量△xu,△yu,△zu,△tu,近似分量經過修正之后又可以認為是已知量,重復這個計算過程,直到修正分量小到預定的范圍之內。最后的近似分量![]() 就是要解的用戶的三維位置和時間偏移量。這種方法即基于線性化的迭代法。
就是要解的用戶的三維位置和時間偏移量。這種方法即基于線性化的迭代法。
1.2 偽距的獲取
分析GPS定位解算算法可知,要解算用戶的三維位置和時間偏移量,首先需要獲得各顆衛星的位置和相應的偽距觀測量,因此,偽距觀測量的精度直接影響到用戶位置解算的精度。
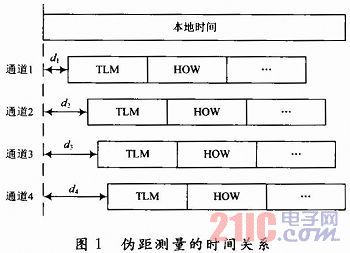
在GPS接收機中,可以任意選擇一個時刻作為本地參考時間,本地參考時間與GPS系統時間的差值即為時間偏移量tu。對于GPS信號發射時間而言,如果不考慮每顆衛星的時鐘修正項,所有衛星的導航電文子幀1的起始點都是在同一時刻發射的,因此可以認為不同衛星的導航電文子幀1的發射時刻是相同的,繞行電感但是不同衛星的子幀1的起始點是在不同時刻接收到的,這個時間差就代表不同衛星到接收機的時間差,即距離差。在導航電文中,子幀1每30 s出現1次,而不同衛星信號到達接收機所需時間的差值最大只有20 ms。因此,很容易保證所觀測的不同衛星的子幀1都是在同一時刻發送的。統計本地參考時間與所接收到的衛星星歷子幀1的開始位置的時間間隔即可得到偽距信息,如圖1所示為偽距測量的時間關系。